
Physical Construction
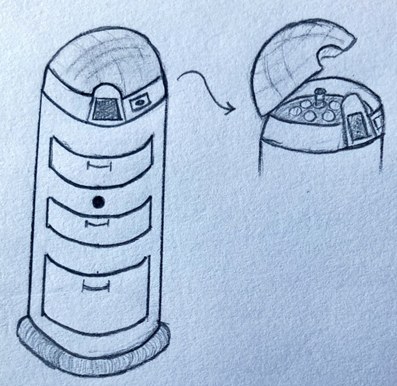
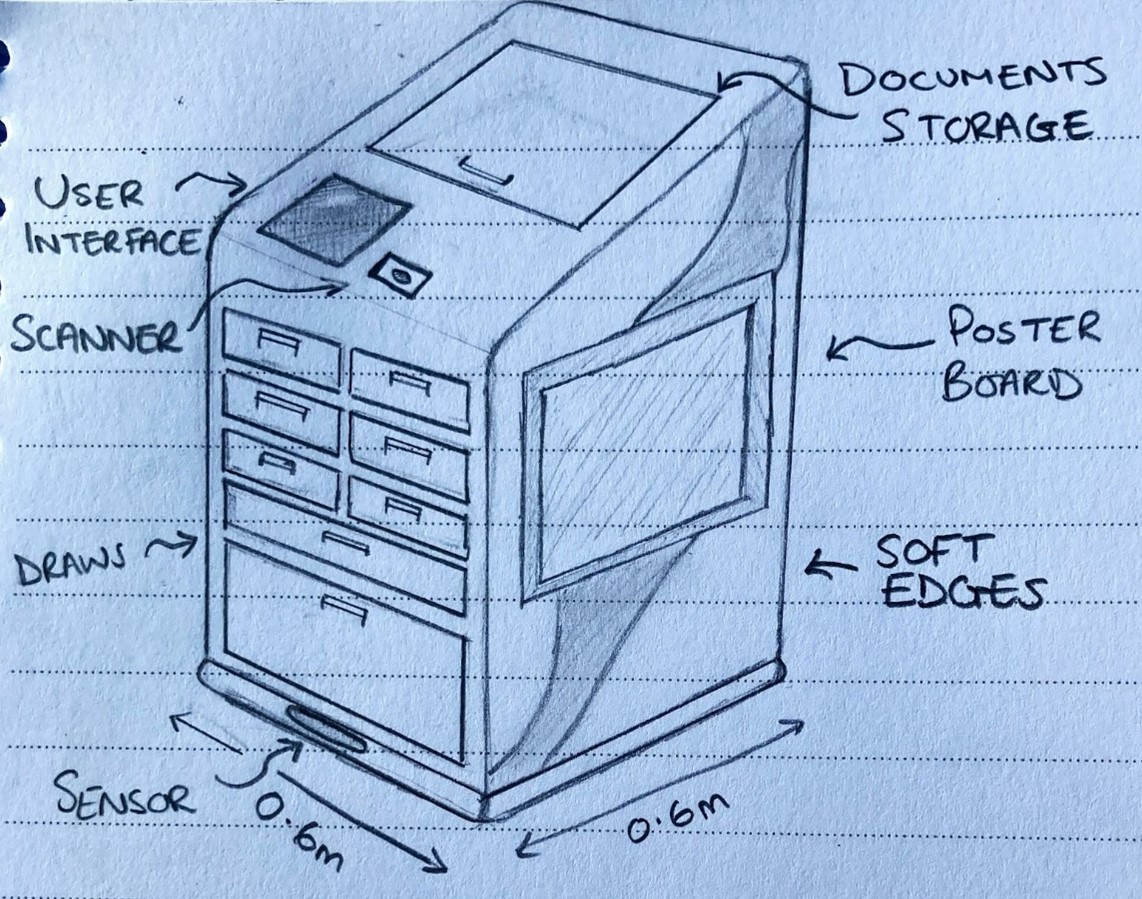
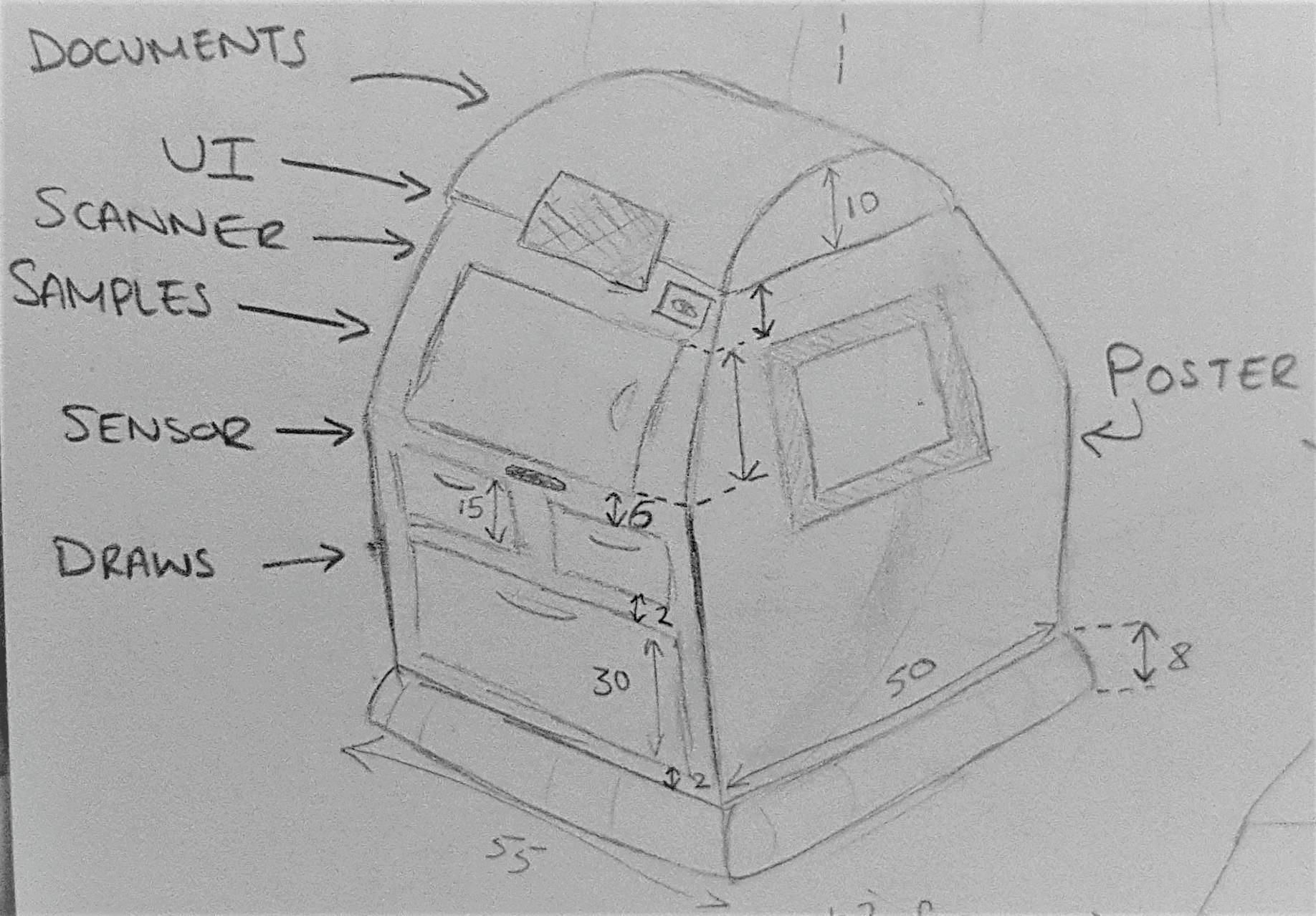
Initial Designs
Our sketches evolved as we analysed different aspects such as its presence in a hospital, any harsh edges and how we could best maximise space within the robot from its exterior shape. Our design process can be reviewed here.
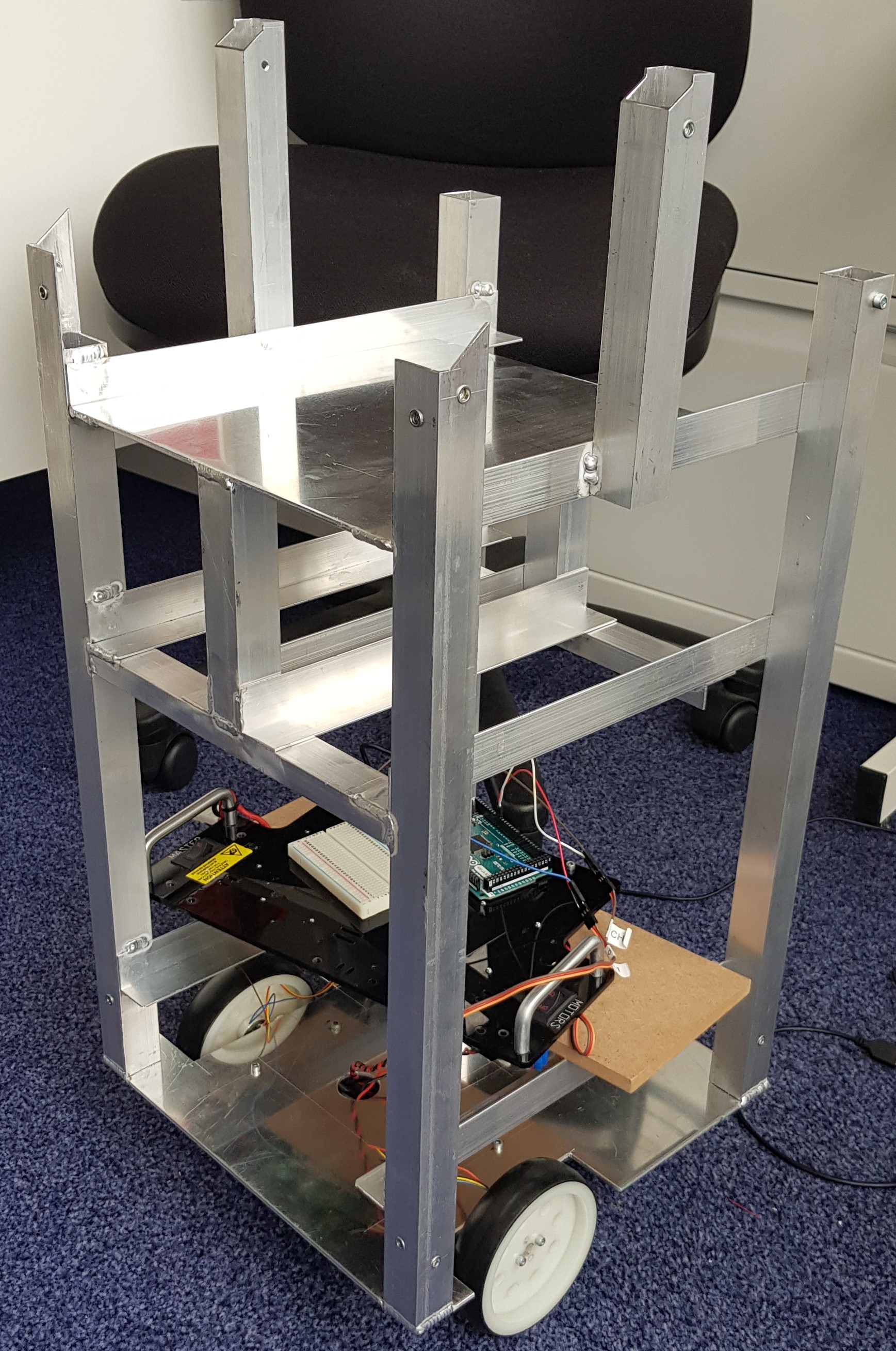
Internal Framework
The framework of the robot has been created from box frame and angle cut aluminum, to provide a light, yet strong skeleton. It is welded together to as to reduce the complexity of atting extra nuts and bolts.

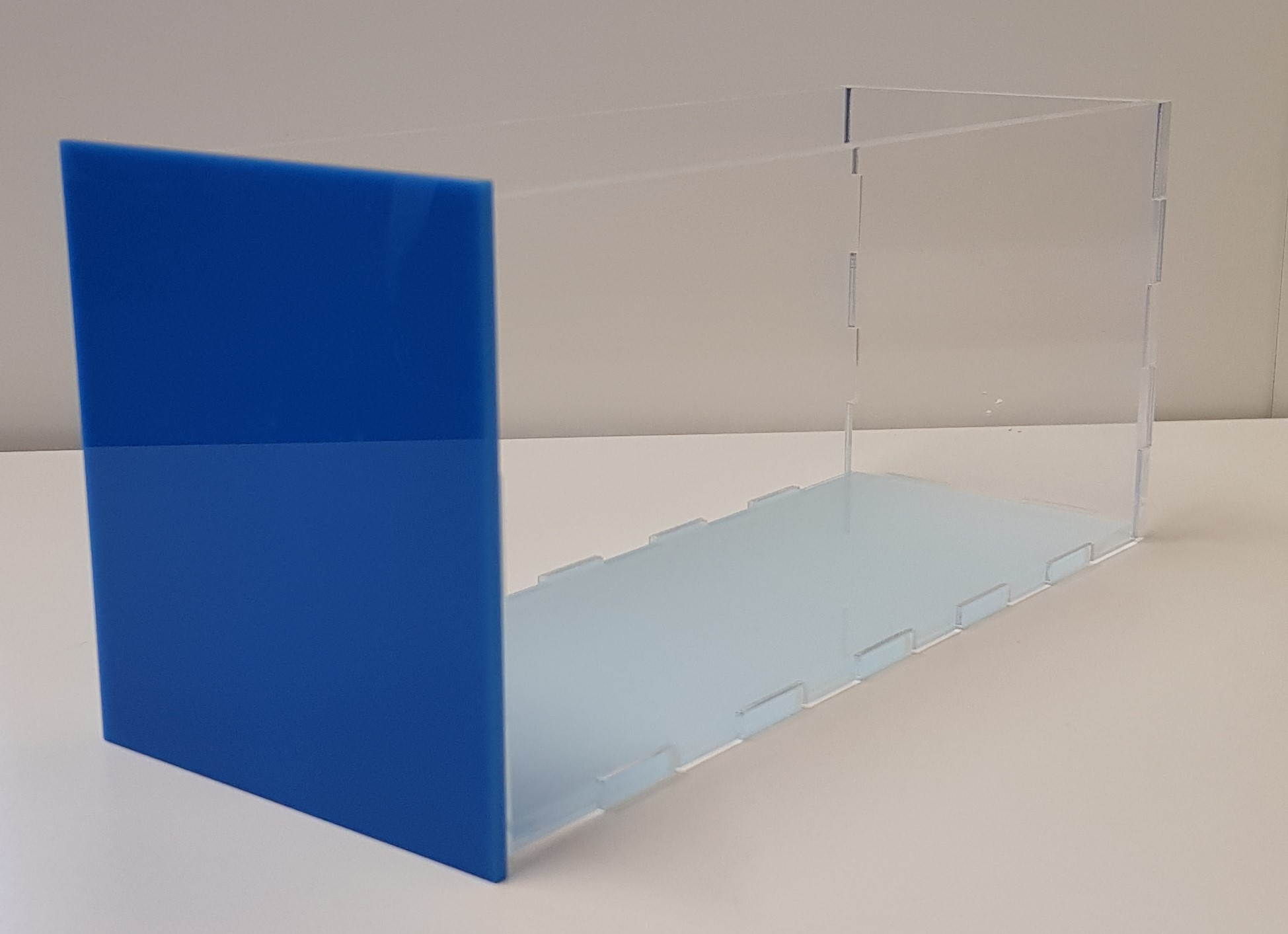
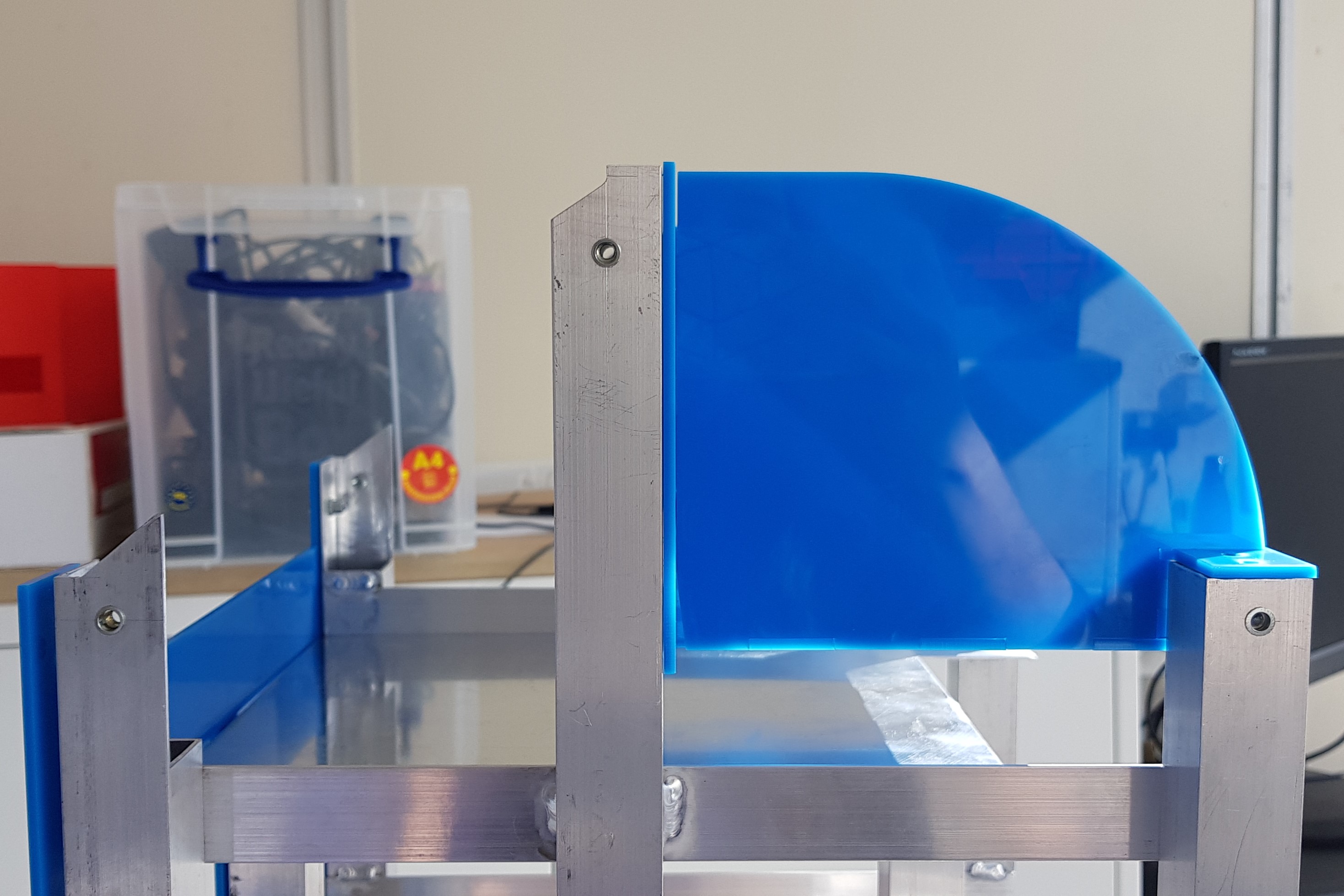
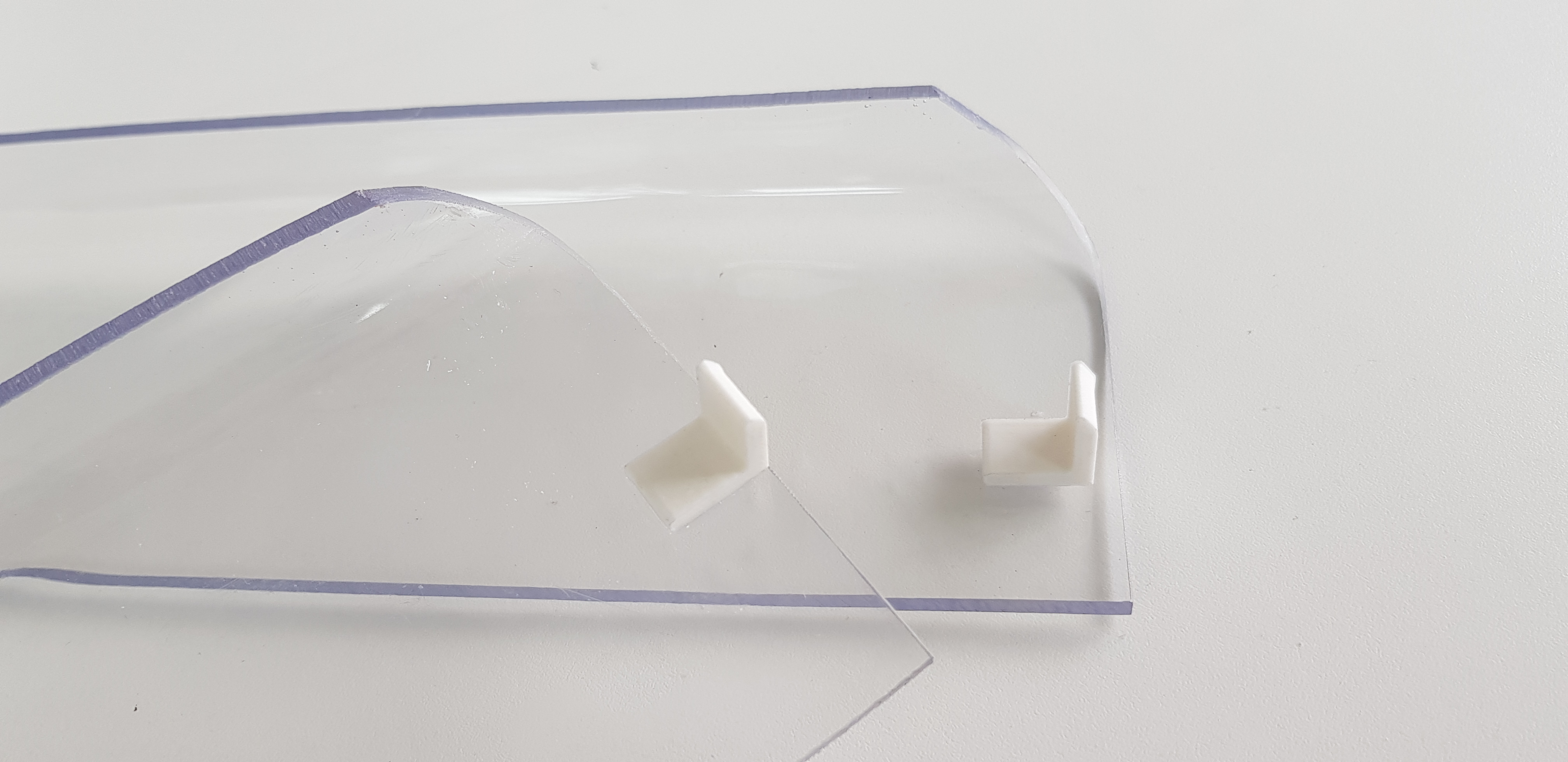
Compartments
Our drawers are laser cut out of acrylic, reinforced with Tensol Cement and a blue front face affixed to fit the rest of the robot. The top compartment lid is made of polycarbonate, bent into shape.

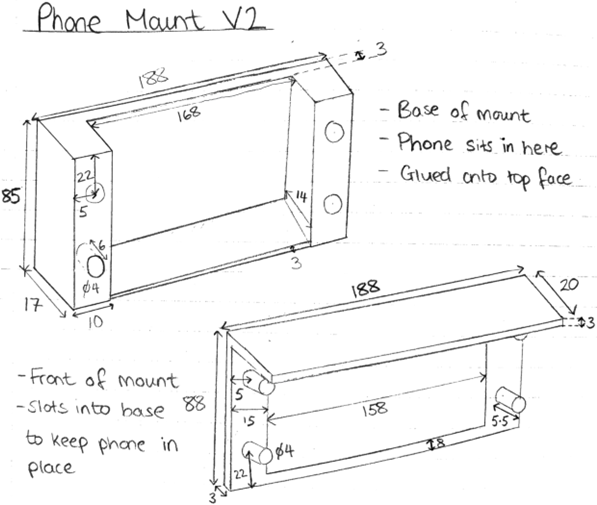
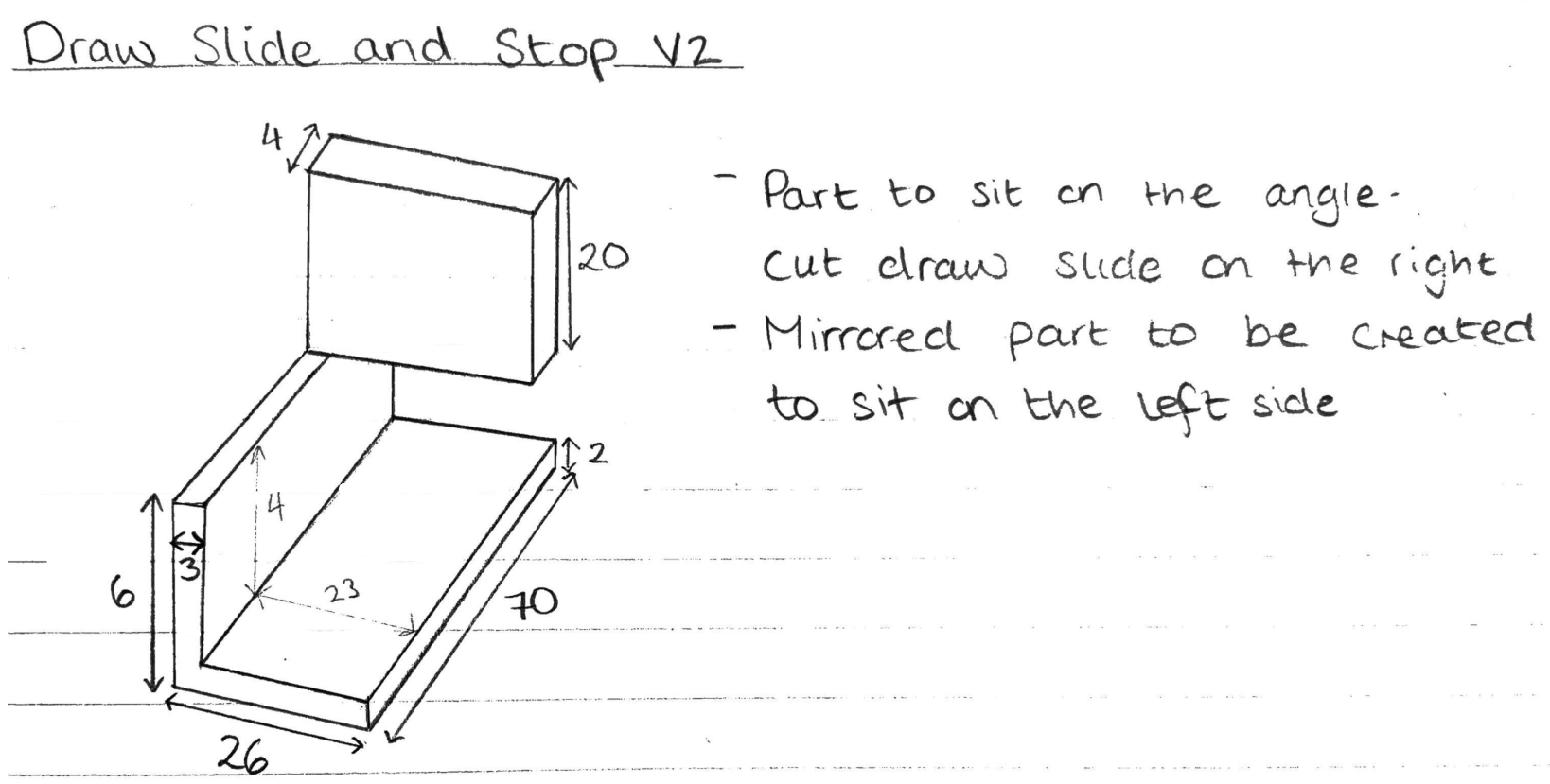
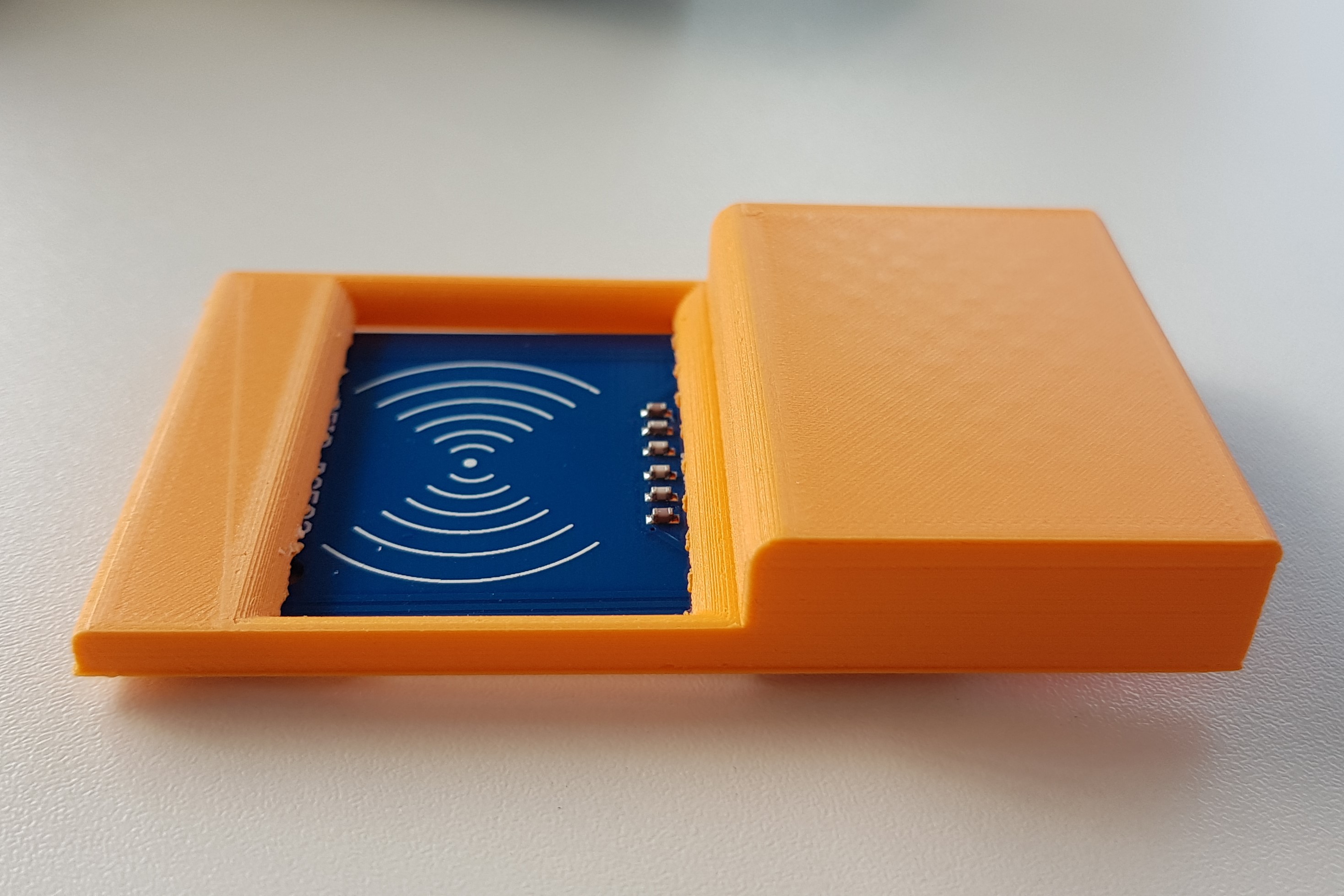
Mounts and Fixings
Various bespoke mounts and brackets have been designed and 3D printed. The full range of printed parts can be seen here.



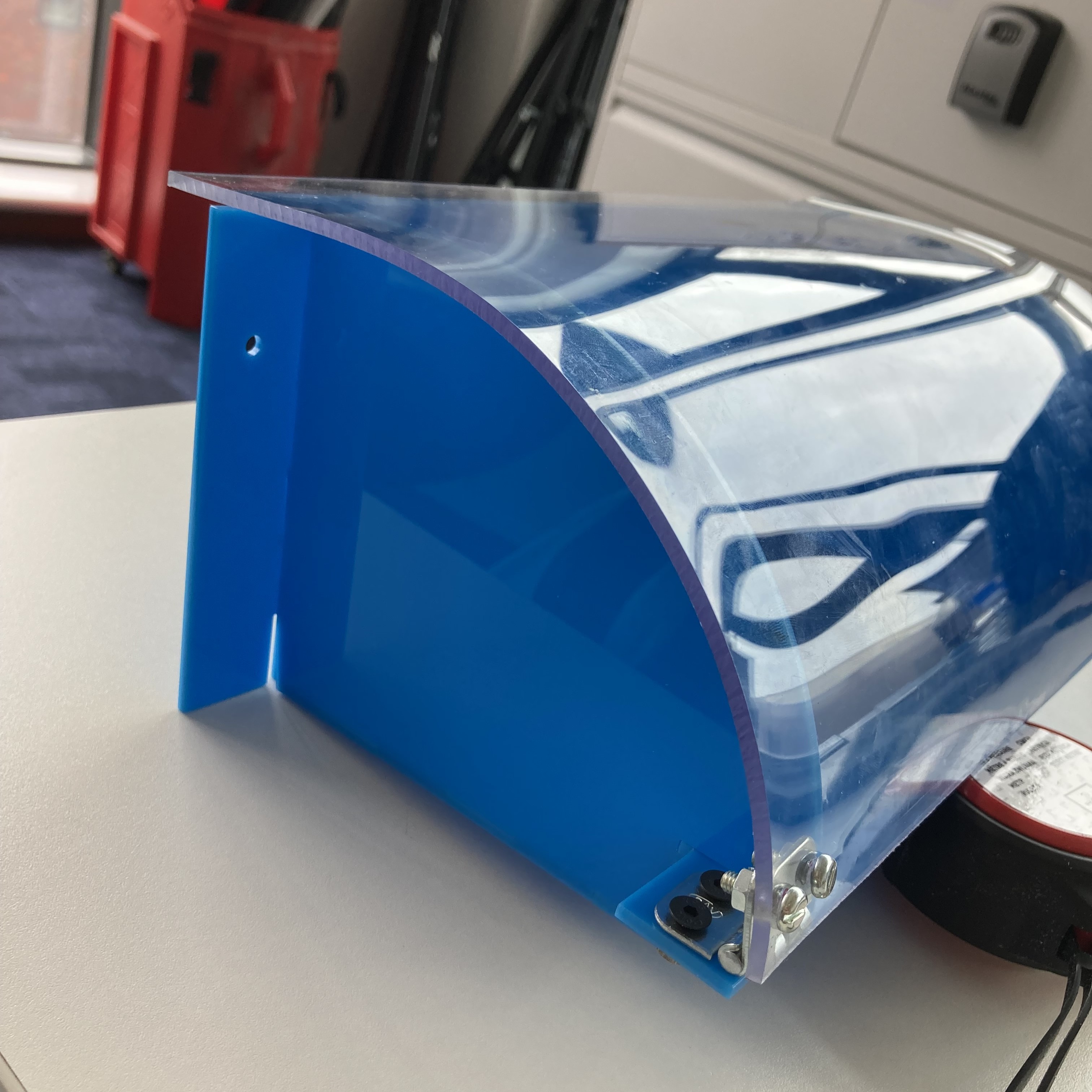
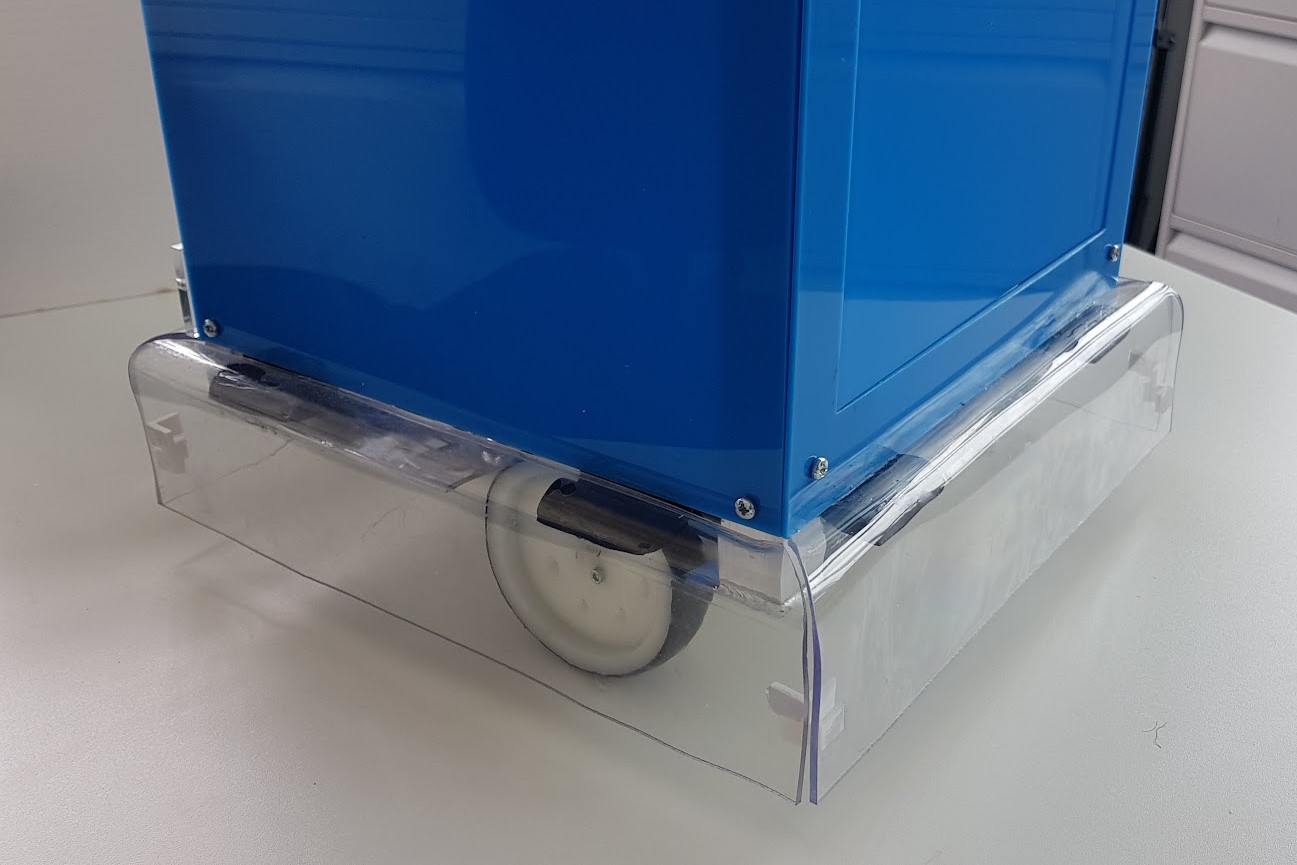
Skirt
The skirt around the robot is to protect it from collisions. It is made from 3mm polycarbonate which has been bent into shape.
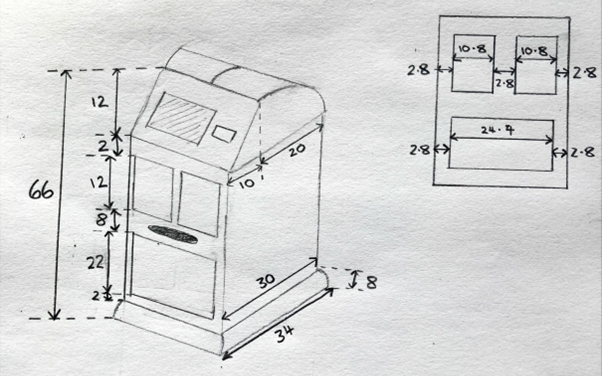
Final Product

Our robot stands at 0.66 m tall, by 0.35 m wide and 0.35 m deep including the base skirt. For more information, our design considerations, including material and equipment justifications, and CAD can be found here.